
PSS Memory Management Fundamentals
02 Apr 2023
Storage (memory) is right in the middle of all the work with do with computer architecture. We have different kinds of memory that each have different trade-offs around performance (latency / throughput), cost per unit, and power consumption. We arrange memories into hierarchies with the goal of keeping frequently-used data in the upper (faster, but limited) layers, while pushing infrequently-accessed data to the lower (slower, but more expansive) layers.
Given the large amount of time time designers spend thinking about memory needs, it’s no surprise that creating good and capable tests to exercise those designs depends on being able to acquire the right type of memory at the right time in order to fully-exercise the capabilities and characteristics of the system.
Remember, though, that we’re writing bare-metal tests. Consequently, we need to allocate memory for our test behaviors ahead of time in order to not waste valuable simulation or emulation time running the ‘malloc’ and ‘free’ algorithm. When done by hand, static allocation can limit how reusable code is and remove the majority of variability (ie randomness) from test scenarios. Fortunately, PSS provides some easy to use features that allow actions to manage memory that they require in a way that enables static allocation while not limiting variability or reuse. Let’s dig in!
Test Requirements for Memory Management
System-level tests have three core requirements when it comes to memory management:
- Ensure that behaviors needing distinct blocks of memory are provided non-overlapping blocks of memory
- Ensure behaviors that need to share data see the same memory
- Ensure that a test is able to explicitly specify the general location in memory (eg SRAM, DDR, etc) where a memory block comes from.
One of the biggest challenges with hand-written bare-metal tests is implementing these three characteristics in a distributed and modular way.
There are two parts of the PSS memory management approach:
- Specification of available memory resource
- Specification of claims on those resources, and how the claimed data is used.
Using Memory in Behaviors
Let’s start with the second point – how we claim memory – since we can see immediately how that fits into our DMA example.
In PSS, an action claims memory by having one or more random fields of type addr_claim_s. The action can control how much memory is being requested, and its alignment, by constraining the fields of the claim.
buffer MemBuf {
rand bit[32] size; // Size of the data
addr_handle_t addr_h;
}
component WbDma {
action Mem2Mem {
input MemBuf src_i;
input MemBuf dst_o;
rand addr_claim_s<> dst_claim;
// Input and output size must be the same
constraint dst_o.size == src_i.size;
// DMA only transfers words
constraint (dst_o.size % 4) == 0;
// Specify size/alignment for allocation
constraint dst_claim.size == dst_o.size;
constraint dst_claim.alignment == 4;
exec post_solve {
dst_o.addr_h = make_handle_from_claim(dst_claim);
}
exec body {
// ...
}
}
// ...
}Okay, we’ve added a few things to the skeleton Mem2Mem action that we created in the last post:
- Added a
sizefield toMemBufto ensure that producers and consumers of this type agree on the data size. - Added an ‘addr_h’ field to
MemBufthat will hold a handle to the allocated memory block. - Add a claim field (
dst_claim) to theMem2Memaction that will cause memory to be allocated for the DMA destination memory - Add constraints to:
- Relate the source and destination buffer objects.
- Relate the source and destination buffer objects.
One new thing is that we assign the address handle to a field in the output
buffer within the post_solve exec block inside the Mem2Mem action.
This is done in order to make the address available to the consumer of the
buffer. Why does this work?
PSS specifies that two actions that are connected by a buffer object
both have a handle to exactly the same object. That means that when the
outputting action assigns a value to a field, it is assigning to the
exact field that the inputting action will read.
Specifying Memory Claim Lifetimes
By default, the lifetime of a memory claim is the same as the action containing it.
component WbDma {
action Mem2Mem {
input MemBuf src_i;
input MemBuf dst_o;
rand addr_claim_s<> dst_claim;
// ...
}
}In the context of our example, that means that dst_claim would be released
as soon as the DMA transfer completes. Clearly, that’s not what we want since we
are claiming dst_claim in order to provide data to another action.
The solution is to extend the lifetime of the memory claim by attaching it to something with a longer lifetime. In this case, that thing with a longer lifetime is, very naturally, the output buffer, since we intend the lifetime of the buffer and the lifetime of our memory claim to match.
component WbDma {
action Mem2Mem {
input MemBuf src_i;
input MemBuf dst_o;
rand addr_claim_s<> dst_claim;
// ...
exec post_solve {
dst_o.addr_h = make_handle_from_claim(dst_claim);
}
// ...
}
}Now, when the memory we’ve claimed is passed to another action via a buffer, the memory claim lives at least until the receiving action is complete.
Describing Memory Resources
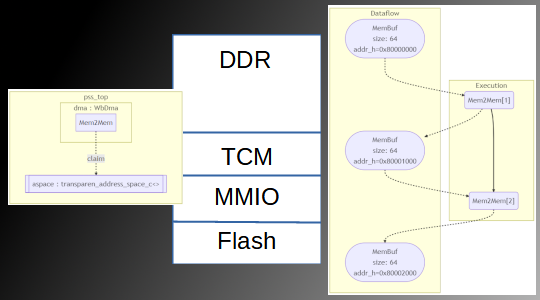
In addition to claiming memory, we also need to capture the memory available to us in the system. This is done by defining an address space with one or more memory regions, from which memory will be allocated.
Address spaces are instanced in the component tree. Recall from the post about actions and components that each action execution occurs in the context of a component instance.
The address space used by a given claim is located by searching hierarchically
up the component tree from the action’s context component instance until an
address space with the same trait type as the claim is found.
This resolution scheme means that we need to exercise care in where we place our address space. Memory is most commonly a system property. If we instance our DMA Engine in two different systems, we could reasonably expect the available memory to be different. The amount of memory is likely to be different, as are the base addresses of key memory regions.
Capturing Available Memory
In our simple example, we will capture the address space for our DMA
engine to use in pss_top.
// ...
component pss_top {
transparent_addr_space_c<> aspace;
WbDma dma;
exec init_down {
transparent_addr_region_s<> region;
region.addr = 0x8000_0000;
region.size = 0x1000_0000;
aspace.add_region(region);
region.addr = 0x0000_0000;
region.size = 0x1000_0000;
aspace.add_region(region);
}
}The available memory regions within the address space are specified in the
init_down exec block. Here, we register two regions of memory – one at
0x8000_0000 and one at 0x0000_0000.
Putting it all together
We’ve completed the basic updates to our PSS model that enable our DMA actions to sensibly management memory.
- We have added a memory claim to the
Mem2Memaction to claim memory for the destination buffer. - We have added a handle to the the
MemBufbuffer type that enables us to properly manage the lifetime of that claimed memory. - We have specified an address space with available regions of memory for
the
Mem2Memaction to use.
At this point, the Mem2Mem action will randomly allocate memory regions from the two registered regions. For now, this is likely just fine. In the future, we will need to take finer-grain control over where our memory claims are satisfied. Fortunately, PSS provides features to support that requirement as well.
In this post, we’ve seen the steps necessarily to make use of the core memory-management features that PSS provides. Now that we know how to manage memory as a test-scenario resource, we can turn our attention to managing another type of resource: the DMA channels within the engine.
Resources
- [1] PSS LRM
- [2] DMA PSS Code (Viewing)
- [3] DMA PSS Code (Raw Text)