
DPI Isn't Enough: Making Python Part of Your SV Testbench
04 Nov 2024
I’ve been using Python for verification since early 2019 for personal projects, and have found both the language and the rich ecosystem of general and special-purpose libraries to be incredibly helpful in quickly and efficiently bringing up a testbench environment. cocotb, the most popular integration between Python and HDL simulators, integrates with the simulator at the signal level. This isn’t a problem as long as you fully adopt Python as your testbench methodology and implement everything in Python – from test scenario down to BFMs interacting with signals. Sometimes this is the case, but often we have an existing SystemVerilog environment that we’d like to mix some Python into. We might have an existing BFM implemented in SystemVerilog that we’d like to call from Python. We might have an existing UVM environment from which we want to call a Python library.
SystemVerilog simulators support the Direct Procedure Interface (DPI), of course, which allows SystemVerilog to call C code and for C code to call SystemVerilog. Unfortunately, DPI on its own, doesn’t provide the features that we need for a fully-featured integration between Python and a HDL simulation. As you might surmise, though, I’m about to describe a library (PyHDL-IF) that fills in the missing pieces. Before we get there, though, let’s have a look at how we’d like to interact with Python in a SystemVerilog testbench
Using Python from SV and Vice Versa
Calling Python from SV
Requirements:
- Be able to keep things dynamic
- Don’t require any Python library-specific SV code in order to use the library
- Be able to look up Python elements by name, etc
- Ideally, have some utilities on the SV side to make this easier
This is actually pretty easy, since the CPython interpreter has a C API. If we expose the C API via SystemVerilog DPI, we can make the same calls from SystemVerilog that we would make from a C/C++ application. The C API is fairly low-level and detailed, but we can always add a layer of SystemVerilog utility classes on top.
This type of integration works well for using Python libraries to access data (ie JSON, YAML, etc), when we want to manipulate data using a library like Pandas, or when we want to use a Python library to generate reference data. In other words, as long as our SV call to Python returns immediately.
Calling SV from Python
Python gets much more interesting – and useful – in a SystemVerilog testbench when a Python method call from SystemVerilog can consume simulation time.
This allows us to implement active elements of a our testbench, such as tests, in Python. It also allows us to call existing testbench elements, such Bus Functional Models (BFMs), from Python.
This usecase is where SystemVerilog DPI poses some technical challenges. Both SystemVerilog and Python implement cooperative multi-threading, Unfortunately, the requirements that they place on how threaded behavior interacts with the outside world (and vice versa) prevent cross-calling in a ‘blocking’ manner between the two languages.
Additional Requirements
Beyond the raw capability to cross-call between SystemVerilog and Python, there a few additional requirements that vastly simplify the ability to create reusable infrastructure.
- Reusable functionality should be implemented by Python and SystemVerilog code only. Application-specific DPI C code brings platform dependencies and exposes us to implementation details of how different simulators deal implement DPI. These are things you want to deal with as infrequently as possible, and certainly not every time you add a new Python+SV library.
- Any generated code should be, at most, application-specific. Specifically, the end user shouldn’t need to re-generate application-specific code.
PyHDL-IF Package
With those use models and requirements in mind, let’s take a look at the PyHDL-IF library. This library is designed to implement the low-level details of interfacing between Python and SystemVerilog at the method-call level, such that you can focus on writing SystemVerilog and Python and ignore the low-level details implemented in C.
The PyHDL-IF package has several components, but the two most-relevant ones for us are shown in the diagram above. PyHDL-IF provides a SystemVerilog API for calling into Python, and Python and DPI libraries to support calling back into SystemVerilog from Python. It also provides a SystemVerilog code generator to create SystemVerilog class APIs to simplify the process of cross-calling between the two languages.
An Example
To better understand all of this, let’s walk through an example. You can find the full code of this example here: call_sv_bfm example
Here’s a block diagram of what’s happening. We have a SystemVerilog testbench that contains an instance of a Wishbone BFM written in SystemVerilog. Our goal is to write a test in Python that will call tasks in the BFM. We want to start that Python test from SystemVerilog as well.
Let’s dig into some details on how this all fits together.
Python BFM Interface
Let’s start with the Python interface to the Wishbone BFM. You can find the full source here: call_sv_bfm.py
import ctypes as ct
import hdl_if as hif
@hif.api
class WishboneInitiator(object):
@hif.imp
async def write(self, addr : ct.c_uint32, data : ct.c_uint32):
pass
@hif.imp
async def read(self, addr : ct.c_uint32) -> ct.c_uint32:
passA class decorated with the api decorator specifies a cross-language API. Methods within that class that are decorated with import or export decorators support cross-language calling.
Methods are described with respect to Python:
- When an Import method is called from Python, the matching SystemVerilog method is called
- When an Export method is called from SystemVerilog, the matching Python method is called.
Both Python and SystemVerilog have special rules about coroutine methods. In both languages, a coroutine method can call another coroutine method or a non-coroutine method. However, a non-coroutine method cannot invoke a coroutine method. It’s critical to keep this aligned between SystemVerilog and Python:
- An async Python method matches with a SystemVerilog task
- A plain Python method matches with a SystemVerilog function
The API class, with it’s decorators is used for two purposes. One, somewhat obviously, is to implement the Python side of a cross-language API. The other is to generate SystemVerilog to implement the SystemVerilog portion of the API.
SystemVerilog BFM
Let’s move on and take a look at the Wishbone BFM that we will access using the API class that we’ve defined above. You can find the full code here: wb_init_bfm.sv
module WishboneInitiatorBFM(
input clock,
input reset,
output reg[31:0] adr,
output reg[31:0] dat_w,
input[31:0] dat_r,
output cyc,
input err,
output reg[3:0] sel,
output stb,
input ack,
output reg we
);
// ...
task bfm_write(int unsigned adr_v, int unsigned dat_v);
// ...
// Works with the state machine to perform a write
endtask
// ...
class WishboneInitiatorImpl extends WishboneInitiator;
virtual task write(int unsigned addr, int unsigned data);
bfm_write(addr, data);
endtask
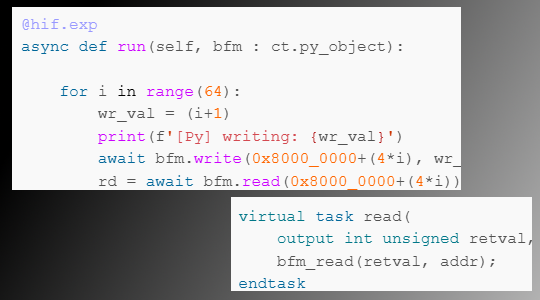
virtual task read(
output int unsigned retval, input int unsigned addr);
bfm_read(retval, addr);
endtask
endclass
WishboneInitiatorImpl m_api_obj;
// Register ourselves with the PyHDL-IF object registry
initial begin : init
m_api_obj = new();
end
// ...
endmoduleKey portions of the BFM interface code are shown above. The BFM defines bfm_read and bfm_write tasks that are used to drive read and write operations via the signal-level interface.
The BFM defines a local class (WishboneInitiatorImpl) that inherits from a class (WishboneInitiator) that is generated from the Python class specification of the API. The derived class here implements the read and write tasks in terms of the BFM’s existing tasks.
Finally, the BFM module creates an instance of the API implementation class.
Python Test Class
Okay, thus far we have a SystemVerilog BFM and a Python API definition for calling it. Now, let’s look at the test code that uses that API. You can find the full source here: call_sv_bfm.py
import ctypes as ct
import hdl_if as hif
@hif.api
class Test(object):
@hif.exp
async def run(self, bfm : ct.py_object):
for i in range(64):
wr_val = (i+1)
print(f'[Py] writing: {wr_val}')
await bfm.write(0x8000_0000+(4*i), wr_val)
rd = await bfm.read(0x8000_0000+(4*i))
print(f'[Py] readback: {rd}')
assert wr_val == rdOur test code is encapsulated in a Python class with an async method.
Our test method expects to receive a handle to the BFM API, which it will
use to perform reads and writes.
Top-level Testbench
Finally, let’s take a look at the top-level testbench that pulls it all together. You can find the full source here: call_sv_bfm.sv
module call_sv_bfm;
import pyhdl_if::*;
import call_sv_bfm_pkg::*;
// ...
WishboneInitiatorBFM init_bfm(
.clock(clk),
.reset(reset),
.adr(adr),
.dat_r(dat_r),
.dat_w(dat_w),
.stb(stb),
.cyc(cyc),
.ack(ack),
.we(we)
);
initial begin
automatic Test test;
pyhdl_if_start();
#50ns;
reset = 0;
// Create an instance of the Test class and run
$display("%0t --> run", $time);
test = new();
test.run(init_bfm.m_api_obj.m_obj);
$display("%0t <-- run", $time);
$finish;
end
endmoduleThe top-level testbench instances the BFM. This results in the BFM creating an instance of the Python class that can be used to call the BFM. The result is a SystemVerilog class that holds a handle to the corresponding Python class.
The top-level ‘initial’ block in the test module creates an instance of the
Test Python class. As with the BFM, the result is a SystemVerilog class
that holds a handle to the matching Python class.
Finally, we call the run method on the Test class and pass a handle to the
BFM’s Python class. The run method will, of course, call back into
SystemVerilog to invoke the BFM’s methods.
Summary
We’ve quickly walked through an example of integrating Python and SystemVerilog such that we can implement Python methods that make task calls into the simulator. This can allow us to either quickly graft some Python onto am existing BFM we have in our testbench. It could allow us to easily add an existing SystemVerilog BFM to our existing cocotb Python testbench and call it from our Python tests. There are, of course, more applications and usecases for PyHDL-IF. We’ll look at those in future posts.