
Unlocking the Combined Strength of UVM and Python
04 Oct 2025UVM and Python are often positioned as rivals when it comes to their role in functional verification, with teams picking one or the other as the basis for a verification environments. Each have strengths, though, and using them together produces much stronger results. In fact, building on the popularity of UVM and the availability of UVM verification components provides a significant boost to the process of introducing Python to an existing UVM environment.
Assessing Languages for Functional Verification
Using object-oriented languages to develop hardware verification environments for simulation and hardware emulation is a longstanding practice. This is enabled by the fact that dynamic verification of hardware has a lot in common with testing software. Aside from constrained randomization, tests for hardware look very similar to tests for software. Likewise, scoreboards and other analytics components organize, filter, and categorize data in very software-centric ways.
SystemVerilog is a commonly-used object-oriented language that is often used alongside UVM. But, C/C++, Java, and Python have all been used for verification for many years with and without UVM.
There are many factors to consider when selecting the languages to use for verification. It’s important to consider the features provided by the language, the size of its library ecosystem, and the size of the community. All of these contribute to the perceived ease with which new content can be developed using the language. Given the popularity of AI assistants, it’s also important to consider how ‘AI friendly’ the language is.
The Python language ranks highly on these criteria. It is the most popular software language by several measures, and has been for some time. Development in Python is supported by a sizable collection of development tools and libraries. And, it offers superior results with AI assistants due to the availability of large volumes of training data for large language models (LLMs).
Ease of Integration and Reuse
But, for hardware verification, two of the most important factors to consider are ease of integration into a simulation environment and how readily existing collateral can be reused. Both of these are critical in assessing how easily a new language can be incrementally added to existing environments.
When it comes to ease of integration with simulation environments, Python also ranks very highly. The cocotb library is a well-known and well-maintained library that implements a dynamic integration with simulation environments at the signal level using the VPI API. This allows Python-driven tests to easily interact with a design at the signal level.
When it comes to reuse of existing infrastructure, the picture with Python is a bit
more mixed. cocotb only supports integration at the signal level, which prevents
reuse of existing SystemVerilog object-oriented collateral.
Having a strong reuse strategy is critical to the success of bringing a new verification language into an existing environment. It’s likely that many thousands of person hours have been applied to building up the verification collateral in a verification environment. Not only is it prohibitively expensive to re-develop this in a new language, doing so risks the introduction of instability through new bugs.
The pyhdl-if library enables the use of Python with existing SystemVerilog
classes through the use of generated wrappers. This opens up significant new
possibilities for reuse, but does come with a cost. In the worst case, each
and every VIP in a verification environment will require a task-based interface
to be designed and developed. This forces teams to be selective in which
components are exposed to Python which, in turn, limits adoption of Python.
Ideally, we want the best of both when it comes to integration and reuse. We want a low-effort integration that also supports seamless reuse of existing SystemVerilog object-oriented verification collateral.
Focusing on UVM
Fortunately, UVM helps to suggest a solution. Because of the popularity of UVM,
focusing on enabling easy integration with UVM environments is a good 80+% solution.
Recent enhancements to the pyhdl-if library provide a ready-made integration with
UVM classes, enabling Python behavior to be initiated from UVM and UVM components
to be used from Python. All without any custom wrapper code.
UVM provides several key areas of functionality, all of which are supported by APIs:
- Component structure
- Sequences and sequencers
- Register model
- Configuration database
- Factory
In addition to having access to these APIs, we also need to address two challenges:
- How to work with user-defined types and data
- How to initiate Python behavior
Example
Over the next few posts, we’ll dig into all the details of how this works from a technical perspective. For now, let’s take a look at a simple example that highlights just how easy it is to add Python behavior to a UVM environment by leveraging the UVM API.
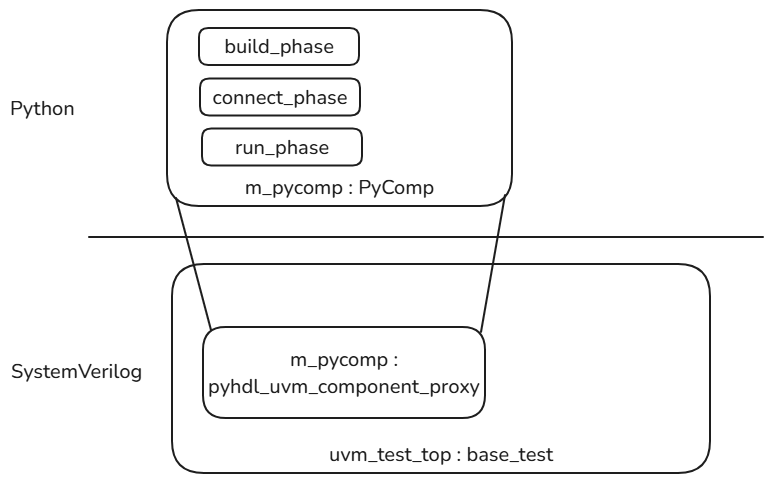
This example shows how we can use a component proxy class in SystemVerilog to initiate Python behavior from our UVM testbench. As the diagram suggests, we will add a new component instance in SystemVerilog that will act as a proxy for a UVM component implementation in Python.
package top_pkg;
import uvm_pkg::*;
import pyhdl_uvm::*;
// Test
class base_test extends uvm_test;
pyhdl_uvm_component_proxy m_pycomp;
`uvm_component_utils(base_test)
function new(string name = "base_test", uvm_component parent);
super.new(name, parent);
endfunction
function void build_phase(uvm_phase phase);
super.build_phase(phase);
m_pycomp = pyhdl_uvm_component_proxy::type_id::create("m_pycomp", this);
m_pycomp.pyclass = "pycomp::PyComp";
endfunction
task run_phase(uvm_phase phase);
$display("--> test run_phase");
phase.raise_objection(this);
// Test stimulus would go here
#100;
phase.drop_objection(this);
$display("<-- test run_phase");
endtask
endclass
endpackageThe additions to the SystemVerilog portion of the testbench are minimal. Specifically:
- New field for the component proxy
- Construction of the component proxy in the build_phase.
- Specification of the Python class that implements the component
Now let’s look at the Python class:
from hdl_if.uvm import UvmComponentProxy
class PyComp(UvmComponentProxy):
def build_phase(self, phase):
print("-- build_phase", flush=True)
def connect_phase(self, phase):
print("-- connect_phase", flush=True)
async def run_phase(self, phase):
print("Hello from PyComp run_phase", flush=True)The implementation must inherit from the UvmComponentProxy base class. The build_phase, connect_phase, and run_phase methods will be invoked by the SystemVerilog UVM environment.
And, that’s it. No need to generate API interface classes, and just a few lines a code needed to get something running.
If you’re interested, you can look at the full code here.
Conclusions and Next Steps
Of course, the example above only shows how to get started.
Over the next few posts, we’ll dive into more detail on the capabilities of the
pyhdl-if library UVM integration. We’ll also look at usecases for Python in
a verification environment.